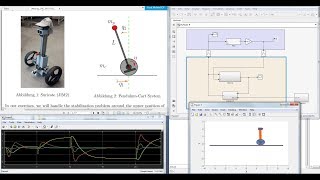
State Space Control for the Pendulum-Cart System: A short tutorial on using Matlab® and Simulink®
Similar Tracks
Linearize Nonlinear Systems in Simulink and Export to MATLAB Workspace-Control Engineering Tutorials
Aleksandar Haber PhD
Optimal Control (CMU 16-745) 2025 Lecture 24: Data-Driven Control and Behavior Cloning
CMU Robotic Exploration Lab
Lecture 26, Feedback Example: The Inverted Pendulum | MIT RES.6.007 Signals and Systems, Spring 2011
MIT OpenCourseWare
Nonlinear Model Predictive Control (MPC) Implementation in MATLAB from Scratch - Part 1
Aleksandar Haber PhD